
PÁGINA INICIAL SOBRE O PROJETO CONTATOS
O projeto surgiu como trabalho de conclusão do curso de Licenciatura em Física do Instituto Federal do Paraná Campus Telêmaco Borba, turma de 2014. Juntamente com o Prof. Dr. Rafael João Ribeiro e Prof. Me. Gregory Vinicius Conor Figueiredo, orientadores do projeto, decidimos testar a viabilidade de criar e utilizar pistas projetadas em desafios de robótica. Vários testes foram realizados para verificar a leitura dos sensores quando submetidos diretamente a luz de um projetor. Essa foi a etapa decisiva para seguir a diante com o projeto pois o sensor é responsável por "enxergar" o trajeto a ser seguido e os obstáculos dispostos no caminho. O sensor mostrou uma resposta adequada mesmo em um ambiente iluminado.
Com os testes do sensor realizados, decidimos utilizar a programação em Java no Robô, pois dessa forma teríamos a opção de uma programação mais elaborada, de acordo com as necessidades do projeto. Após os testes criamos desafios de Física envolvendo robótica e pistas virtuais projetadas. Optamos trabalhar o conteúdo de cinemática, o que permitiu aplicar os conceitos Físicos diretamente na solução dos desafios. Nada impede a criação de pistas para trabalhar outros conteúdos, tudo depende da criatividade dos envolvidos. As pistas foram programadas nos softwares Construct 2 e Construct 3 que são gratuitos e possuem um mecanismo de Física adequado para simular várias situações. O kit Lego Mindstorms NXT, foi escolhido para o desenvolvimento do robô. Para realizar a programação, o firmware original do controlador NXT foi substituído pelo LeJOS NXJ, que possibilita a programação do robô com a linguagem Java, utilizada para programar as rotinas e tarefas executadas pelo robô. Em uma nova etapa do projeto foi criado um robô utilizando a plataforma Arduino com o intuito de diminuir custos do projeto. No Arduino alguns componentes como sensor e motor podem ser reaproveitados de sucata eletrônica. Esta nova opção de robô viabiliza o uso em escolas com baixo orçamento.
Durante a realização do projeto pudemos constatar a viabilidade do uso das pistas virtuais tanto no ensino de Física, quanto em competições voltadas a Robótica. E por que não misturar as competições de Robótica com o ensino de Física? Desta forma podemos levar a aprendizagem além da sala de aula e o aluno poderá ver na prática a aplicação dos cálculos que estuda na disciplina de Física, além é claro de poder se divertir enquanto aprende.
Nos materiais de apoio disponíveis na página inicial estão descritas as etapas para montagem, programação do robô, programação das pistas e os roteiros para os desafios propostos. Na seção de contatos está o endereço de e-mail para que os interessados no projeto possam enviar suas dúvidas e sugestões.
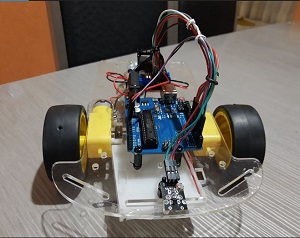
Nas imagens dos robôs utilizados no projeto é possível ver os sensores apontados para cima para poderem captar a luz da imagem projetada

Durante os testes de leitura e comandos foi possível verificar que o robô segue a pista virtual da mesma forma que segue uma pista convencional desenhada no chão.
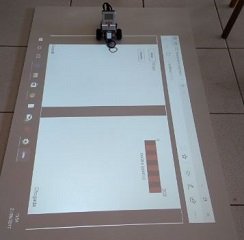
Na figura acima pode ser visto a pista utilizada para o desafio de velocidade média com o robô posicionado na linha de largada. Nesse desafio o robô terá que chegar até as linhas dispostas no trajeto, cumprindo alguns requisitos, antes que as linhas desapareçam. DEsa forma podem ser trabalhados, por exemplo, os conceitos de velocidade média e velocidade instantânea.

Na visão geral da montagem pode ser visto o projetor montado em um suporte para projeção vertical e a pista vitual projetada no piso.
Gilberto de Oliveira Viana
Licenciado em Física pelo Instituto Federal do Paraná - Campus Telêmaco Borba
Especialista em Ensino de Ciência e Tecnologia do Instituto Federal do Paraná - Campus Telêmaco Borba
Técnico em Eletromecânica pelo Instituto Federal do Paraná - Campus Telêmaco Borba
Técnico em Eletrotécnica pelo SENAI - CETCEP
Rafael João Ribeiro
Doutor em Ensino de Ciência e Tecnologia pela Universidade Tecnológica Federal do Paraná – UTFPR
Mestre pelo Programa de Mestrado Profissional em Ensino de Ciência e Tecnologia da Universidade Tecnológica Federal do Paraná – UTFPR
Pós-graduado em Informática em Educação pela Universidade Federal de Lavras – UFLA
Licenciatura Plena em Física e Formação Pedagógica pela Universidade Tecnológica Federal do Paraná – UTFPR
Bacharel em Física pela Universidade Estadual de Ponta Grossa – UEPG
Gregory Vinicius Conor Figueiredo
Mestre em Computação Aplicada pela Universidade Estadual de Ponta Grossa - UEPG
Pós-graduado em Mecatrônica Industrial pela Pontifícia Universidade Católica do Paraná - PUC
Graduado em Engenharia de Computação pela Universidade Estadual de Ponta Grossa - UEPG